
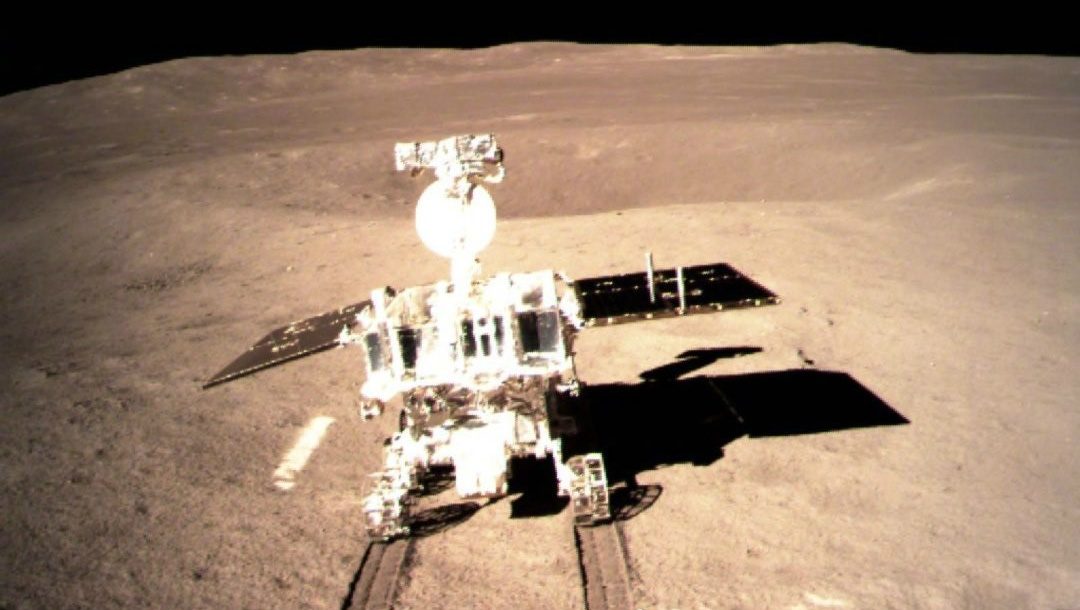
El rover, capaz de soportar la presión de vacío, la radiación intensa y las temperaturas extremas, está equipado con cuatro cargas científicas, que incluyen una cámara panorámica, un espectrómetro de imágenes infrarrojas y dispositivos de medición por radar.
Madrid, España, 7 de enero de 2019. El explorador lunar de China, Yutu-2, ha empezado a explorar el terreno en el lugar de aterrizaje de la misión Chang’e 4 de la cara oculta de la luna.
El rover, capaz de soportar la presión de vacío, la radiación intensa y las temperaturas extremas, está equipado con cuatro cargas científicas, que incluyen una cámara panorámica, un espectrómetro de imágenes infrarrojas y dispositivos de medición por radar, para obtener imágenes de la superficie de la Luna y estudiar la composición del suelo.
Yutu-2 (que significa “conejo de jade”) se separó del aterrizador sin problemas el 3 de enero, dejando un rastro en el suelo lunar suelto. El proceso fue grabado por la cámara en el módulo de aterrizaje y las imágenes se enviaron de vuelta a la Tierra a través del satélite de reenvío Queqiao, anunció la Administración Nacional del Espacio de China(CNSA).
Lanzada el 8 de diciembre de 2018, la sonda lunar Chang’e-4 de China, compuesta por un módulo de aterrizaje y un vehículo de aterrizaje, aterrizó en el otro lado de la Luna a primera hora del 3 de enero.
Dado que el ciclo de revolución de la Luna es el mismo que el ciclo de rotación, el mismo lado siempre enfrenta a la Tierra. El otro lado, que en su mayoría no se puede ver desde la Tierra, se llama lado lejano o el lado oscuro porque en su mayor parte está sin cartografiar.

Después del aterrizaje exitoso, los expertos verificaron las condiciones de Queqiao (“puente de la urraca”), que se lanzó en mayo de 2018 para establecer el enlace de comunicación entre la Tierra y el otro lado de la Luna, el parámetro del entorno de la zona de aterrizaje, las condiciones de los equipos de la sonda, así como el ángulo de la luz solar entrante para hacer los preparativos para la separación del módulo de aterrizaje y el vehículo móvil, dijo la CNSA en un comunicado.
Después de recibir los telemandos, Yutu-2, aún dentro de la sonda, extendió su panel solar y su mástil y comenzó a conducir lentamente hacia el mecanismo de transferencia que lo llevó a superficie, según el Centro de Control Aeroespacial de Pekín.
El mecanismo de transferencia se desbloqueó según lo previsto, con un lado que llega a la superficie de la Luna, lo que permitió al rover descender a la superficie desde la pendiente.


